人类的运动控制能力是一项复杂而高效的技能,他可以通过规划、执行和组合各个肢体运动来产生复杂的全身运动,而机器人一直以复刻与人类类似的能力为目标,于是一项受人体运动启发的新研究诞生了。
该研究利用分层生成模型来增强自主机器人的电机控制,实现了受人类运动控制启发的高度复杂任务,这主要是通过三种方法实现的:命令、规划和学习。人类的运动控制系统是通过多层次的神经结构实现的,包括高级规划和底层肢体运动协调。
由英特尔实验室、伦敦大学学院和VERSES研究实验室组成的研究小组最近在《自然机器智能》杂志上发表了一项关于机器人运动控制的研究,通过分层生成模型提高了自主机器人的运动控制能力。
为了模拟这种复杂性,研究团队采用了分层生成模型,将任务分解为不同层次的动作,并模拟人类运动控制的深度时间架构。这种分层组织的优势在于能够同时处理全局规划和局部控制,使机器人能够在复杂和不确定的环境中执行任务。
李志斌副教授和神经科学家Karl Friston教授是本项研究的主要作者,他们通过模仿人脑结构,他们开发了软件、机器学习和控制算法,提高了自主智能机器人在完成复杂日常任务方面的可靠性。
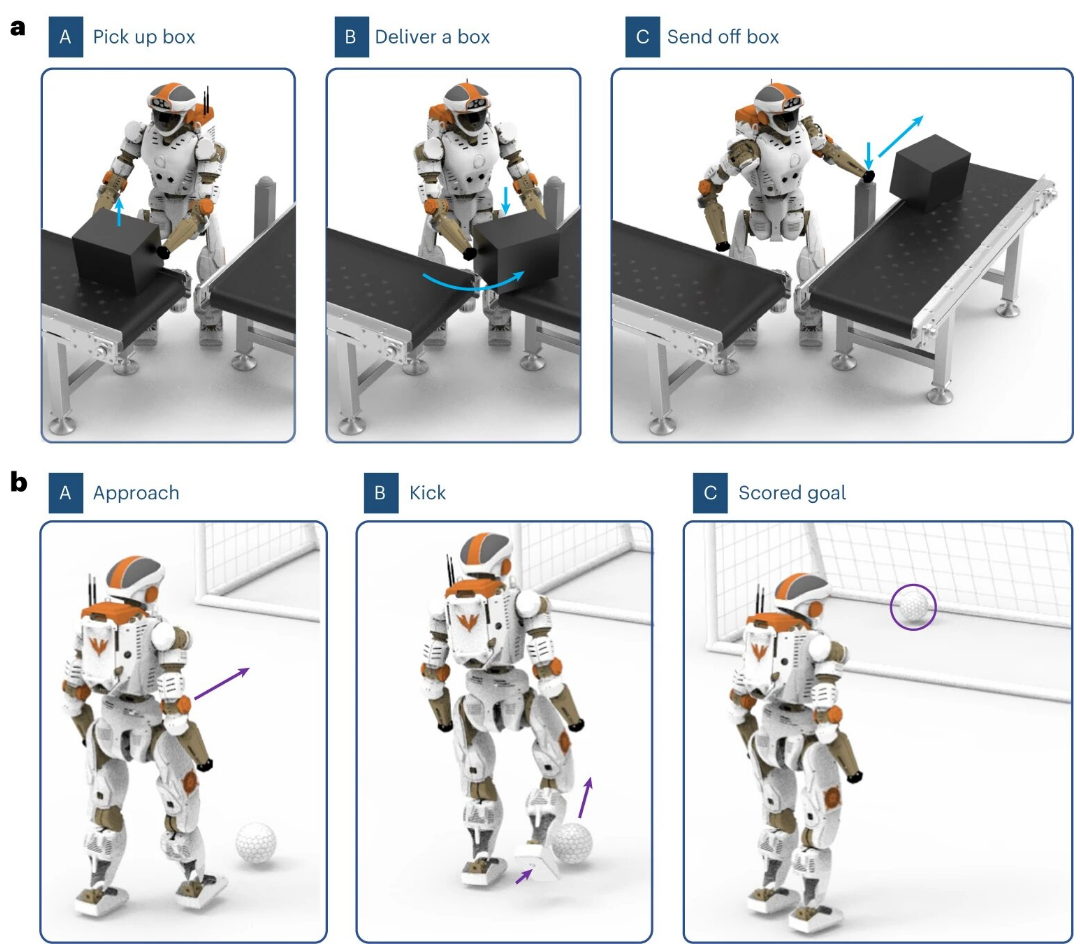
李志斌教授介绍道:“我们最近的论文探讨了如何从生物智能中获取灵感,以形式化机器人学习和控制。这使得我们能够在一个连贯的框架内进行自然的运动规划和对机器人运动的精确控制。通过广泛的模拟,我们展示了全身人形机器人在仓库环境中能够运输箱子、打开门、操作设施(例如传送带)、踢足球,甚至在机器人身体受到物理损坏的情况下仍能持续操作。我们的研究突显了大脑中不同皮层如何协同工作的灵感,可以指导智能机器人大脑的设计。”
与其他分层生成模型类似,李志斌教授和他的团队通过将任务组织成不同的级别或层次结构来开发技术,他们的模型将任务的超范围目标映射到不同时间尺度下的个体肢体运动的执行上。
实验初步证明,分层生成模型在将人类能力转移到机器人方面具有巨大潜力,未来将进一步验证这些结果。
人类科学家们正在做大量的工作,来分别复制不同种类的人工智能,现如今已经可以从生物大脑的结构和功能组织层面上汲取灵感,了解不同皮层如何相互协调。未来AI的发展将不可预测,机器人或能成为人类的机械复制品。